CDE2310 Group 1 — AMR for Smart Warehouse Intralogistics
System documentation for the autonomous mobile robot (TurtleBot3 Burger) designed for smart warehouse intralogistics.
🔗 Navigation
- Home
- Requirements
- Con-Ops
- High Level Design ← You are here
- Interface Control Documents
- Software Development
- Testing
- User Manual
- Bill-Of-Materials
- Electrical Subsystem
- Mechanical Subsystem
- Improvements
High Level Design
System Architecture
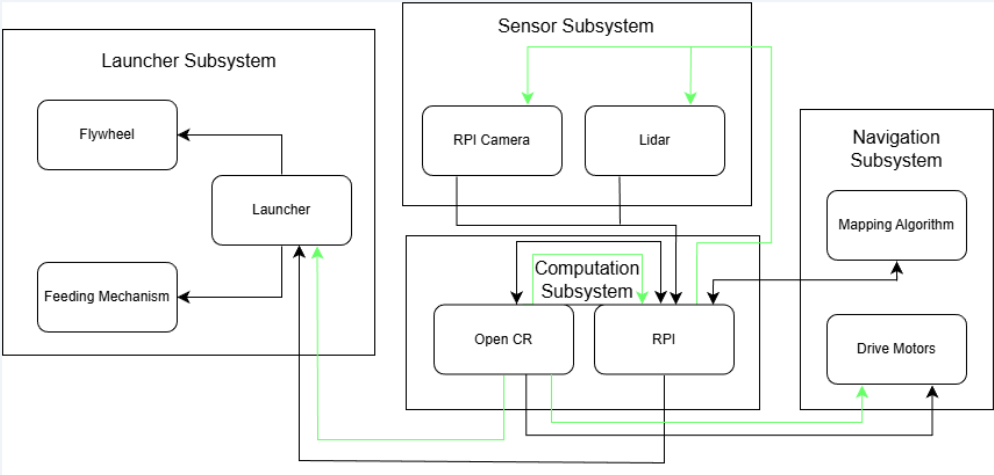 System architecture showing data (black) and power (green) flows across all four subsystems.
System architecture showing data (black) and power (green) flows across all four subsystems.
The system architecture consists of four interdependent subsystems connected through a combination of ROS 2 topics and services, hardware communication buses, and power distribution networks. The Raspberry Pi 4B acts as the central processing hub, coordinating all subsystems.
The data flow architecture follows a layered approach: sensor data feeds into perception and mapping algorithms, which in turn feed the mission controller’s decision-making logic, which commands both the navigation stack and the launcher hardware.
Subsystem Overview
Navigation Subsystem
Responsible for autonomous exploration, mapping, localisation, and goal-directed path planning. Key components:
| Component | Technology | Role |
|---|---|---|
| SLAM | Google Cartographer | Real-time occupancy grid mapping from LiDAR + IMU + encoders |
| Exploration | explore_lite + custom BFS | Multi-layered frontier exploration with fallback strategies |
| Path Planning | Nav2 with NavFn (A*) | Global collision-free path computation |
| Local Control | DWB (Dynamic Window Approach) | Real-time velocity commands for obstacle avoidance |
| Drive Motors | 2 × Dynamixel XL430-W250 | Differential drive via OpenCR 1.0 TTL serial |
Sensor Subsystem
Provides environmental perception through two complementary sensors:
| Sensor | Interface | Purpose |
|---|---|---|
| LDS-02 LiDAR | UART → USB-to-UART Module → USB → RPi | 360° range data for SLAM and obstacle avoidance |
| RPi Camera V2 (IMX219, 8MP) | CSI → RPi | ArUco marker detection and 6D pose estimation |
| IMU (OpenCR onboard) | USB (via OpenCR) | Orientation refinement and drift correction for SLAM |
| Wheel Encoders (Dynamixel) | TTL Serial (via OpenCR) | Odometry for inter-scan motion prediction |
Launcher Subsystem
Handles payload storage, feeding, and delivery:
| Component | Specification | Role |
|---|---|---|
| Ball Storage | Curved gravity-feed tube, 9-ball capacity | Stores ping pong balls without obstructing LiDAR FOV |
| Flywheel Motors | 2 × RF300 Series DC motors at 5V | Dual counter-rotating flywheels for ball launch |
| Motor Driver | L298N H-Bridge | Direction and speed control for flywheel motors |
| Servo Gate | SG90 Micro Servo (PWM, 5V) | Actuates ball release into the flywheel mechanism |
| Barrel Guide | Custom 3D-printed part | Directs ball trajectory through flywheels |
| Feeder Roller | Custom 3D-printed part | Feeds balls from storage into the barrel |
Computation Subsystem
| Component | Role |
|---|---|
| Raspberry Pi 4B | Primary compute — runs all ROS 2 nodes (SLAM, Nav2, mission controller, ArUco detection) |
| OpenCR 1.0 | Low-level motor control, IMU data, and encoder feedback for Dynamixel servos |
Power Architecture
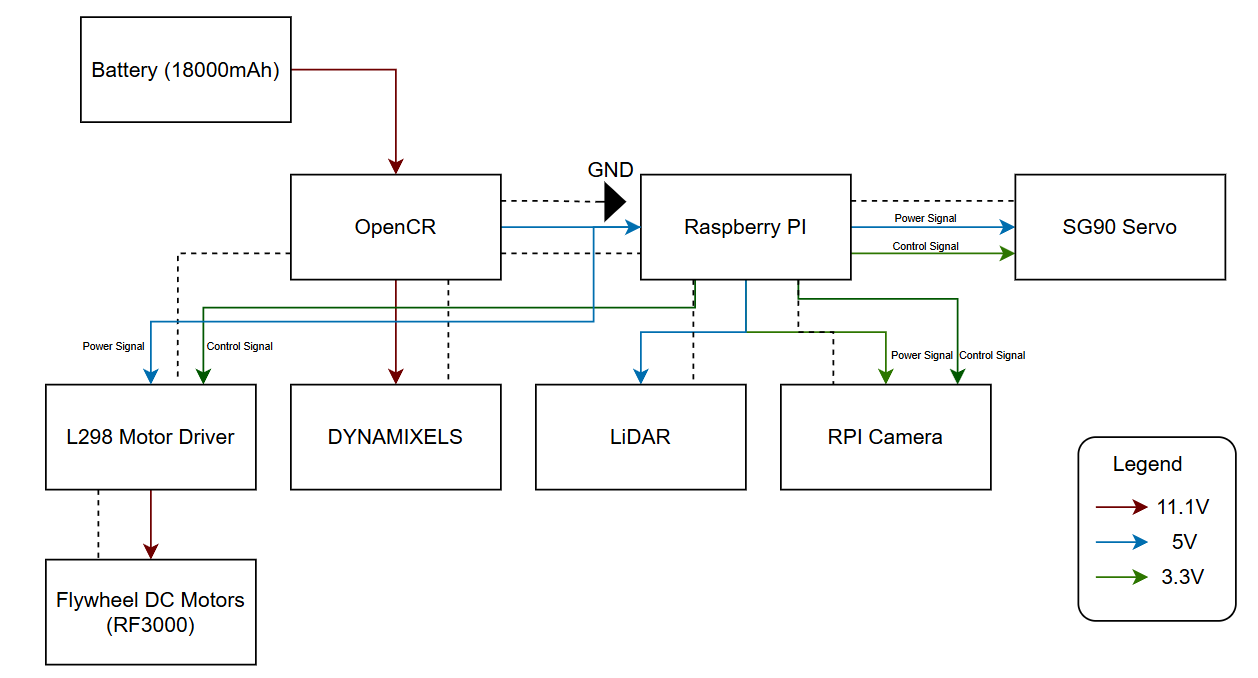 Power distribution diagram showing voltage levels (11.1V, 5V, 3.3V) to each component.
Power distribution diagram showing voltage levels (11.1V, 5V, 3.3V) to each component.
Power is supplied by the TurtleBot3’s onboard 11.1V LiPo battery (1800 mAh). The power distribution follows a hierarchical voltage regulation scheme:
| Voltage Rail | Source | Consumers |
|---|---|---|
| 11.1V | LiPo battery (direct) | OpenCR 1.0, Dynamixel XL430 motors |
| 5V | OpenCR regulated output → RPi 5V rail | Raspberry Pi 4B, L298N motor driver, SG90 servo, LiDAR sensor, flywheel motors (via L298N) |
| 3.3V | RPi regulated output | RPi Camera V2 |
Power Budget Summary:
| Component | Power (W) | Duration | Energy (J) |
|---|---|---|---|
| TurtleBot (Operation) | 6.3 | 20 min | 7,560 |
| TurtleBot (Startup) | 8.6 | 30 sec | 258 |
| TurtleBot (Standby) | 5.4 | 5 min | 1,620 |
| LiDAR Sensor | 1.0 | 20 min | 1,200 |
| RPi Camera | 0.825 | 20 min | 990 |
| SG90 Servo | 1.24 | 20 sec | 24.8 |
| Flywheel Motors (×2) | 1.0 total | 3 min | 180 |
| Total per mission | ~11,833 J (3.28 Wh) |
Battery capacity: 11.1V × 1.8Ah × 0.9 (efficiency) = 17.98 Wh → approximately 5 mission runs per charge.
Communication Architecture
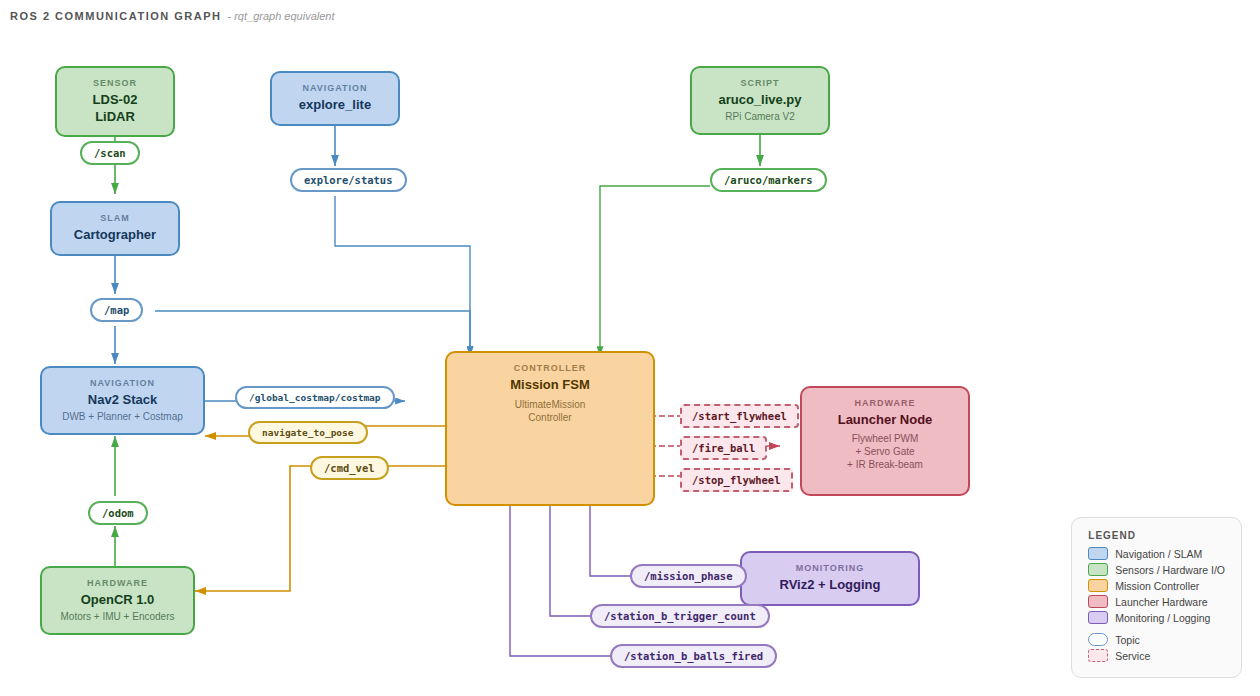 RQT graph showing the ROS 2 node communication topology.
RQT graph showing the ROS 2 node communication topology.
All subsystem communication occurs through ROS 2 topics and services with appropriate QoS profiles. The key data flows are:
LiDAR → SLAM → Navigation: Laser scans feed into Cartographer for map generation, which feeds Nav2 for path planning and obstacle avoidance.
Camera → Mission Controller: ArUco detections provide marker poses for station localisation and real-time visual feedback during docking.
Mission Controller → Navigation: Goal poses are published to the Nav2 action server during exploration and station approach.
Mission Controller → Launcher: Service calls (/start_flywheel, /fire_ball, /stop_flywheel) trigger flywheel and ball release at appropriate moments during delivery.
Mission Controller → Monitoring: Phase status and diagnostic topics enable real-time monitoring via RViz and the mission GUI.
Integration Strategy
Centralised Mission Controller
A single ROS 2 node — the UltimateMissionController — acts as the orchestrator for the entire system. It manages high-level phase transitions (exploration → docking → delivery → transit), coordinates between subsystems, and handles fault recovery. This centralised approach was chosen over a behaviour tree or distributed architecture for simplicity and debuggability within the project timeline.
Coarse-to-Fine Docking
Docking at both stations uses a three-stage approach that transitions control authority from the navigation stack to direct visual servoing:
- Nav2 global planning brings the robot to the station’s general vicinity using stored map coordinates.
- Live marker refinement updates the approach vector using a fresh camera sighting, correcting for SLAM drift.
- Direct cmd_vel control performs final alignment and approach using real-time camera feedback.
This layered handoff ensures reliable docking across the full range — from initial discovery distance (~2 m) down to the camera’s minimum focus range (~0.3 m) and the final target distance (0.10 m).
Single-File Deployment
The entire robot system launches from bringup_all.launch.py, which starts Cartographer, Nav2, and the mission FSM in dependency order using event-driven triggers (no blind timers). The ArUco detection script runs as a standalone process on the RPi. This satisfies the bonus scoring criteria for single-file deployment.
Design Rationale
This architecture was selected to balance reliability, development speed, and debuggability within the project constraints:
| Decision | Rationale |
|---|---|
| Single orchestrator FSM | Keeps mission logic traceable and easy to debug under time pressure, versus behaviour trees or distributed architectures |
| Coarse-to-fine docking | Bridges the gap between Nav2’s goal tolerance (~25 cm) and the mission’s docking precision requirement (~2 cm lateral) |
| Multi-layer exploration | Ensures robustness against maze configurations where any single strategy might miss dead-end corridors or occluded markers |
| Shared docking pipeline | Both stations share the same approach logic — only the firing sequence differs, minimising code duplication |
| YAML state persistence | Eliminates redundant exploration on mission retries, critical when operating within a 25-minute window |
| Cartographer over SLAM Toolbox | Superior map quality is critical for reliable docking alignment; higher CPU load is acceptable on RPi 4B |
| DWB over MPPI | Proven reliability in indoor corridors with lower computational overhead; sufficient for structured maze environments |